編碼器——旋轉角度傳感器
 使用外觀簡單的設備——編碼器(或換句話說,角度傳感器)來定位各種類型的工業設備。
使用外觀簡單的設備——編碼器(或換句話說,角度傳感器)來定位各種類型的工業設備。
編碼器用於將線性或旋轉運動轉換為二進制數字信號。編碼器是一種裝置,其軸連接到被研究物體的旋轉軸上,並提供對後者旋轉角度的電子控制。根據工作原理,編碼器分為光學式和磁性式。
在光學編碼器的軸上有一個圓盤,圓盤周圍有間歇窗口,靠著圓盤有一個 LED 和一個光電晶體管,確保以以下形式形成輸出信號 矩形脈衝串 頻率與窗口數量和磁盤/軸的轉速成正比。脈衝數表示旋轉角度。
光學編碼器可用作增量編碼器和絕對編碼器。
增量式編碼器有一個間歇圓盤,圓盤上有許多與基半徑大小相同的窗口和兩個讀數 光電耦合器,它允許您固定軸的旋轉角度和旋轉方向。在圓盤的額外半徑上,有一個單獨的中斷窗口和一個相應的光耦合器,用於定義起始位置(原點)。
負扭矩 - 增量編碼器提供旋轉角度的相對讀數,旋轉停止時不會保存相關信息。它們的優點包括在高分辨率和高工作頻率下設計簡單(因此成本低)。
具有更高耐用性的增量式編碼器專注於工業應用 - 機械工程、軋機、造船、紡織、鞋類、木工。對於此類編碼器,決定性參數是旋轉角度的分辨率、高頻工作能力、承受惡劣環境條件的高度保護。
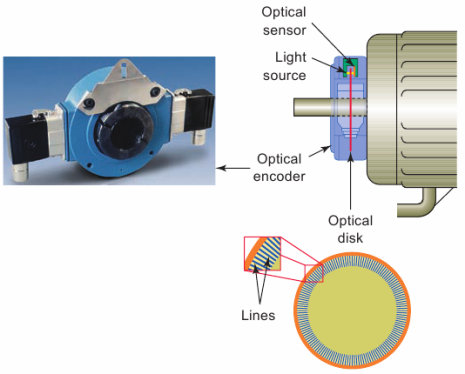
帶有線條或凹口的圓盤會中斷到達光學傳感器的光束。電子電路檢測光束斷裂並從編碼器生成數字輸出脈衝。
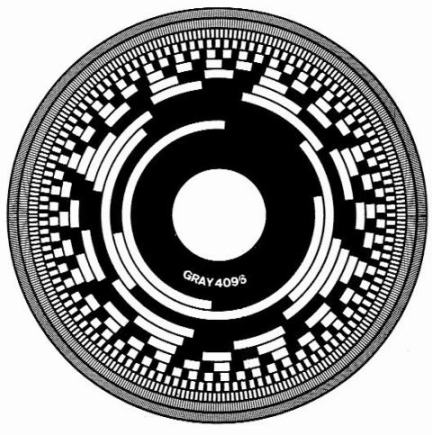
編碼盤——一種將軸的角位移轉換成數字形式的裝置。數字代碼的幾何圖像被應用到編碼盤上。碼位符號應用在同心軌道上,最低有效位(次要有效位)位於更靠近外圍的位置。
根據條碼的讀取方式(接觸式、光電式、電磁式、感應式、靜電式等),條碼的幾何圖像有導電與電絕緣、透明與不透明、磁性與非磁性等。
最普遍的是使用各種二進制代碼對磁盤進行編碼,這排除了跨越單獨離散部分的邊界時發生錯誤的情況,此時可以在邊界的一側讀取某些位,而在另一側讀取一些位(由於安裝不准確)可移動設備或由於磁盤旋轉時非同時讀取代碼這些代碼包括所謂的 Fau 代碼(Barker 代碼)和 Reflex 代碼(Grey 代碼)。
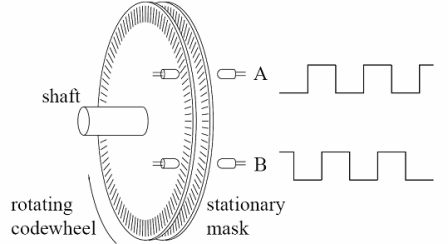
一些光學旋轉編碼器使用反射編碼器盤。該圓盤具有吸收或反射光的交替部分,並且光源和接收器位於圓盤的一側。如果只有一個光源和接收器,來自傳感器的脈衝序列可以讓您找出圓盤相對於其先前位置旋轉了多少步。
傳感器無法判斷旋轉方向,但如果添加第二對源-接收器,與第一個相位差 90°,則微控制器將能夠通過兩者之間的相位差確定磁盤的旋轉方向脈衝序列。
應該記住,任何檢測磁盤相對旋轉但不能測量其絕對角位置的系統都是增量編碼器。
絕對編碼器有一個不連續的圓盤,帶有不同半徑的同心窗口,其相對大小由二進制代碼確定並同時讀取,為每個角位置(格雷碼,二進制代碼......)提供編碼輸出信號。
在這種情況下,可以在沒有數字計數器的情況下獲得軸的瞬時位置數據或返回初始位置,因為輸出有一個編碼字 — «n 位»,不受電氣噪聲的影響。
絕對式編碼器用於需要長期存儲輸入數據的應用,但設計較為複雜,價格也較高。
帶有現場總線接口的絕對值編碼器有一個用於現場總線通信的輸出接口,符合 CANopen、ProfiBus、DeviceNet、以太網、InterBus 標準,並使用二進制代碼確定旋轉角度。上述通信接口可根據許多參數進行編程:例如旋轉方向、每轉脈衝分辨率、波特率。

安裝在電機軸上的編碼器有效地提供了精確的定位控制。這種編碼器通常以“孔”版本生產,特殊聯軸器是其設計的重要元素,可以補償電機軸的間隙。
在上述條件下定位最有效地提供了一種磁編碼器,其中軸的角位移轉換為電子信號是基於霍爾效應以非接觸方式進行的,與內部光斬波器的旋轉無關傳感器並允許以高達 60,000 rpm 的速度進行信號處理。
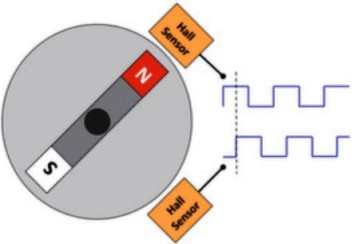
在磁性編碼器中,其上固定有永磁體的外軸的高速旋轉由結合在單半導體晶體上的霍爾傳感器和信號處理控制器來感測。
當永磁體的兩極在微電路上旋轉時 霍爾傳感器 可變磁感應矢量感應霍爾電壓,其中包含有關軸旋轉角度瞬時值的信息。微控制器提供霍爾電壓到定位角度參數的快速轉換。

這種轉換無需磁鐵和霍爾傳感器元件直接機械連接的可能性是磁性編碼器的主要優勢,為它們提供了高可靠性和耐用性,並使其能夠在與工業自動化、印刷、金屬加工相關的高速應用中高效工作,測量和測量設備。