地面操作的橋式起重機電力驅動電路
水龍頭圖和保護功能
 在工業中,在低強度的運輸和存儲作業期間,在機房和實驗室中,使用大量的橋式起重機,或者零星地運行,或者以每小時 6-10 次的起重週期運行。為這種起重機使用全職操作員在經濟上是不切實際的。這就是為什麼越來越多的橋式起重機在地面上操作的原因。
在工業中,在低強度的運輸和存儲作業期間,在機房和實驗室中,使用大量的橋式起重機,或者零星地運行,或者以每小時 6-10 次的起重週期運行。為這種起重機使用全職操作員在經濟上是不切實際的。這就是為什麼越來越多的橋式起重機在地面上操作的原因。
從地面控制的橋式起重機的一個特點是只有在專門指定的地方才能接近起重機進行維修和控制,這些地方配備了適合檢查機械和電氣設備的區域。因此,起重機的整個電氣設備保護系統必須構建成在緊急情況下起重機可以在地面控制下並且在電路中沒有起重機的情況下被帶到維修區域 短路和接地故障.
在這方面,在落地式起重機上, 斷路器 沒有安裝。主電路由自動電源開關保護 基本手推車和控制電路的保護—— 保險絲 適用於 15 A、380 V 的電流,控制電路的導線橫截面為 2.5 mm2。對機構電驅動進行過載保護 熱繼電器 在發動機的主電路中。
為了使水龍頭在熱保護被觸發後移動,繼電器觸點連接到控制面板上的按鈕。該閥配備了輸入電壓信號燈、線路保護接觸器後電壓信號燈和熱保護操作信號燈。
橋式起重機運動機構的電氣圖
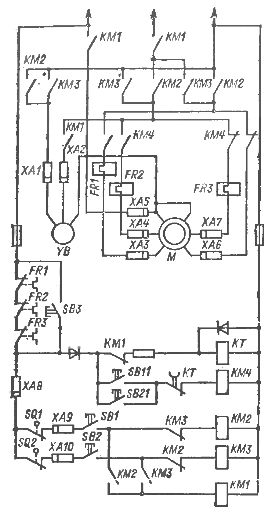
在圖。圖 1 為單速電機短路控制下的電驅動運行示意圖。
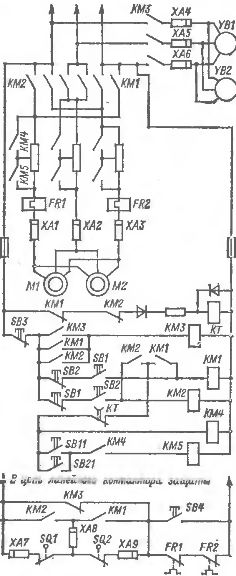
米。 1、起重機行走機構電驅動(單速鼠籠式電動機)地面作業方案: M1、M2——電動機,YB1、YB2——制動電磁鐵或電液推桿,KM1、KM2——方向接觸器,KM4、KM5——電路定子中的電阻接觸器,KMZ——制動接觸器,KT——啟動時間繼電器,FR1、FR2——熱繼電器,SQ1、SQ2——限位開關,SB1、SB2——運動方向按鈕(兩個- 方式), SB11, SB21 — 啟動按鈕, SB3 — 自由移動停止按鈕, SB4 — 熱保護旁路按鈕, XA1 — XA9 — 電流傳輸小車觸點
該電路設計用於驅動負載能力為 3-20 噸的轉向架起重機和負載能力為 2-5 噸的起重機的起重機驅動器。鼠籠式電機的定子繞組通過兩級從電源供電電阻器。驅動器的機械特性如圖 1 所示。 2、一個。
電力驅動的控制——通過懸浮按鈕。該控件包括兩個主要的雙向按鈕 SB1 和 SB2,它們發出向兩個方向移動的命令。當使用按鈕 SB11、SB21 發出命令時,無需調整電阻器即可轉換到位置。
當發動機啟動時,通過接觸器KM1、KM2的觸點通過KMZ的觸點向YB制動驅動器供電。電機關閉後,制動驅動繼續通電,機構自由運轉,鬆開制動器,使用轉向架和車橋機構通用的SB3按鈕。觸發時 限位開關 SQ1和SQ2,保護線路接觸器跳閘疊加 機械剎車.
提供電力 反向制動 使用免費啟動後 時間繼電器 CT 具有 2-3 秒的時間延遲,可將驅動器減速至具有最小啟動(制動)轉矩的位置。
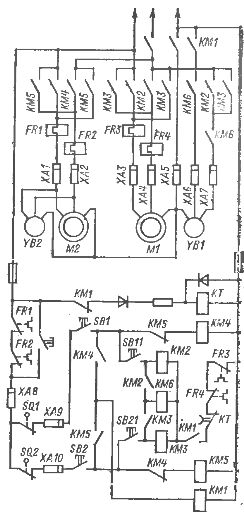
在圖。圖 3 顯示了用於橋式起重機(小車)移動的電力驅動示意圖 兩速鼠籠式電機… 電機有兩個獨立的繞組,極比為



SB1或SB2按鈕包括方向接觸器KM1、KM2和低速接觸器KM4。通過接觸器KMZ向電機低速繞組供電後,制動執行器YB1、YB2得電。要切換到高速,雙向按鈕 SB 閉合觸點 SB11、SB21(第二個位置)並打開接觸器 KM6。
高速線圈與低速線圈同時通過電阻接入電網。然後關閉低速線圈。在 KT 繼電器延時(2-5 秒)後,接觸器 KM5 接通,電機達到其高速模式的自然特性(圖 2,b)。
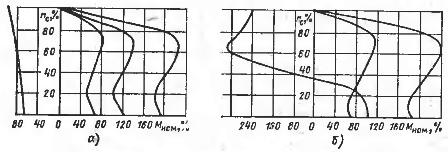
米。 2.機械特性圖13
當電機與電源斷開時,制動執行器繼續通電並發生慣性滑行。由高速變低速時可採用電制動。要釋放制動器,只需按下 SB3 按鈕。
當最後一道防禦被開場觸發時 保護面板上的線路接觸器 電動機關閉,機械制動器接合。該機制受到最大強度的抑制。
由於高速繞組在電路中使用了電阻,在時間繼電器KT的控制下進行了比較軟的啟動,但低速繞組的製動力矩不受限制,在這種情況下,軟啟動制動可以通過SB1或SB2按鈕的幾個脈沖開關來實現。
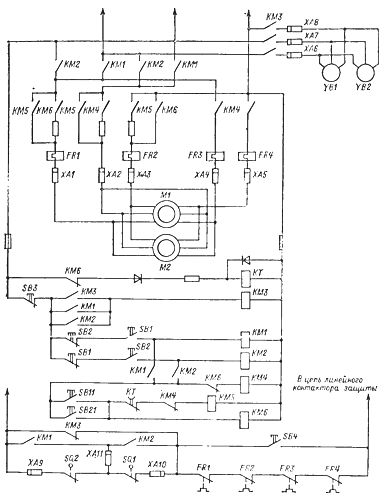
米。 3.地面操作時起重機運行機構的電驅動(帶兩速鼠籠電機)圖:M1。M2 - 電動機,YB1、YB2 - 制動驅動器,KM1、KM 12 - 行進方向接觸器,KMZ - 制動接觸器,KM4 - 低速接觸器,KM5 - 高速接觸器,KM6 - 定子電路中的電阻接觸器, FRI、FR2、FR3——熱繼電器,KT——運行控制時間繼電器,SQ1、SQ2——限位開關,SB1、SB2——行駛方向按鈕(雙向):SB11、SB21——高速按鈕(第二按鈕位置SB1、SB2), СВЗ — 釋放自由停止按鈕,SB4 — 熱保護旁路按鈕,ХА1- ~ ХЛ11 — 電流傳輸小車的觸點。
在圖。圖 4 為採用雙速電機的橋式起重機行走機構示意圖,無自由排水。該電路不同於低速和高速繞組依次加入考慮的電路,繞組串聯時制動力矩有一定限制。該方案推薦用於室外作業的橋式起重機。
起重機起昇機構連接圖
在圖。圖 5 為電動葫蘆驅動的控制電路,採用兩速鼠籠式電動機,具有兩個獨立的繞組,極數比為 4/24 和 6/16。該電路基於電動機繞組主電路和製動驅動電路兩個獨立裝置的雙重分斷原理構建,提供了提升驅動所需的可靠性。
按下相應按鈕SB1、SB2(第一位置)後,電動機低速繞組通過線路接觸器KM1的觸點、方向接觸器KM2、KMZ的觸點和接觸器KM4的分斷觸點供電。
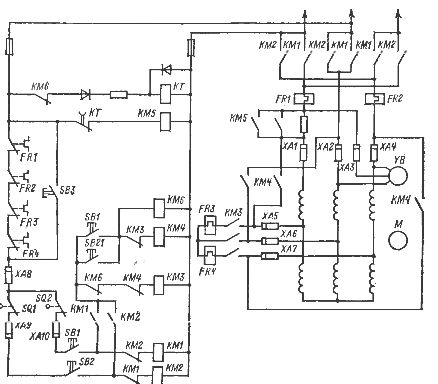
米。 4、起重機運行機構電驅動(採用雙速鼠籠電機)方案:M——電動機,YB——制動驅動,KM1、KM2——運動方向接觸器,KMZ——低速接觸器,KM4——高速接觸器,KM5——高速電阻接觸器,CT——啟動時間控制繼電器,FR4——熱繼電器,SQ1、SQ2——限位開關,SB1、SB2——行程方向按鈕,SB11、SB21——高位速度按鈕,SB3 — 旁路熱繼電器按鈕,XA1 -XA10 — 電流傳輸觸點
當按下SB11(SB21)按鈕時,接觸器KM4的線圈得電,從低速切換到高速,斷電最小。在這種情況下,高速和低速線圈禁用時不能有位置。從低速繞組到高速繞組的轉換是在時間繼電器KT的控制下進行的。當限位保護被激活時,電機繞組和製動器被激活兩次。
在圖。圖6顯示了升降機構的電驅動圖,其中兩個短路的電動機相互連接並通過齒輪比為6-8的行星齒輪連接到變速箱。低速電動機M2在機構運行的整個過程中都處於開啟狀態。高速電機在高速運行期間接合。低速電動機具有內置制動器。
米。 5、起昇機構地面操作時電驅動(採用二速鼠籠式電動機)方案:M——電動機,YB——制動線圈,KM1——百合接觸器,KM2——KMZ——方向接觸器, KM4——速度切換接觸器,FR1——FR3——熱繼電器,CT——加速控制繼電器,SQ1、SQ2——限位開關,SB1、SB2——方向按鈕(雙向)。 SB3——分流熱繼電器按鈕,SB11、SB21——高速按鈕(按鈕SB1、SB2的第二個位置),XA1——XA10——電流轉換小車觸點。
米。 6、起昇機構落地運行微電機方案:M1-高速電機,M2-低速電機,YB1-高速制動線圈,YB2-低速電機制動線圈,KM1 - 線性接觸器,KM2 - KMZ - 高方向接觸器,KM4,KM5 - 低速接觸器,KM6 - 高速制動接觸器,KT - 啟動時間控制繼電器,SQ1,SQ2 - 限位開關,FR1 - FR4 - 熱繼電器, SB1、SB2——雙向方向按鈕,SB11、SB21——高速按鈕(按鈕SB1、SB2的第二個位置),XA1——XA10——電流傳輸小車觸點
高速電動機有一個單獨的製動器,由 電動液壓推進器… 當方向鍵SB1(SB2)按下時,接觸器線圈KM4(KM5)得電,低速電機啟動。同時,公共線路接觸器 KM1 接通。
當按鈕SB1(SB2)完全按下時,觸點SB11(SB21)閉合,接觸器KM2(KMZ)和KM6的線圈得電,但在繼電器KT控制下的低速啟動時間已到後,高速電機開啟。
關閉高速電機後減速上升或下降時,由YB1制動器進行低速制動。限位開關 SQ1 和 SQ2 啟動後,電驅動關閉,電機和製動驅動雙開路。
所有描述的方案,根據在地板上工作時激活起重機機構的規定,只需不斷按下按鈕。當任何類型的保護關閉時,無論按鈕控制的狀態如何,機構都會停止設備。
圖 1 中考慮的方案。 2-5個可以組裝起來 標準磁力啟動器 類型 PMA、PML 和時間繼電器。一個例外是圖 1 中的圖表。 2 其中接觸器用於切換轉速 直流接觸器 MK1-22, 40 A, 380 V, 線圈220 V。根據所示方案,功率為0.8至2×8.5 kW的電機控制板和功率為10至22 kW的起重電機控制板已發達。