輸送機驅動鏈
 本文研究了一些輸送機的電力驅動方案。在圖。圖 1 顯示了各個輸送線的電力驅動示意圖,其速度必須嚴格相同。這種需求出現在連續生產中,當不同的產品在不同的生產線上進行必要的技術操作後,必須嚴格按照彼此的要求在裝配現場相遇。
本文研究了一些輸送機的電力驅動方案。在圖。圖 1 顯示了各個輸送線的電力驅動示意圖,其速度必須嚴格相同。這種需求出現在連續生產中,當不同的產品在不同的生產線上進行必要的技術操作後,必須嚴格按照彼此的要求在裝配現場相遇。
該方案允許您同時啟動和停止多條輸送線並調整它們的速度。協調運動是通過使用普通逆變器變頻器根據同步軸方案切換電機來實現的。電機 D1 和 D2 的速度控制是通過使用變速比齒輪箱 P 改變逆變器的速度來完成的。
啟動輸送機的許可由監控最關鍵區域輸送機運行的操作員授予。當按下準備按鈕 G1 和 G2 時,信號燈 LS1 和 LS2 點亮,繼電器 RG1 和 RG2 被激活。後者為啟動 RP 準備繼電器。
當您按下啟動按鈕時,RP 被觸發,從而打開接觸器 L1。逆變器位置 D1 和 D2 存在單相同步。延時後,內置於接觸器 L1 和 L2 中的擺動繼電器交替打開 L2、L1 和 LZ。變頻電機變阻器的啟動是按時間原理進行的(時間繼電器RU1、RU2、RUZ)。
在圖。圖 2 顯示了地鐵自動扶梯的電力驅動圖,它允許您在乘客的上升和下降上工作。驅動電機使用功率高達 200 kW 的帶相位轉子的異步電機。在一天中的某些時段,由於客流量不大,自動扶梯可以長時間幾乎處於閒置狀態。
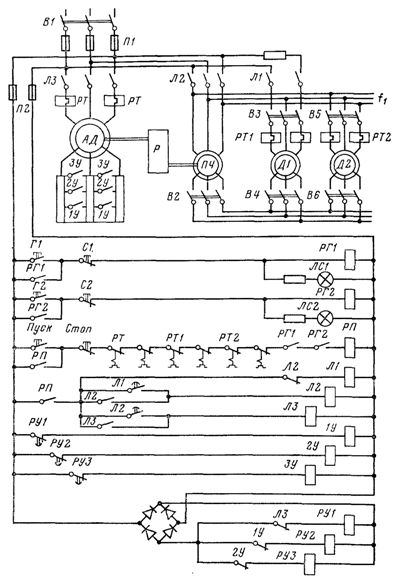
米。 1. 協調運動輸送線電驅動方案。
為了提高電機的功率因數和效率,當其軸負載降低到額定值的 40% 左右時,定子繞組由三角形切換為星形。隨著負載的增加,它又變回三角形。
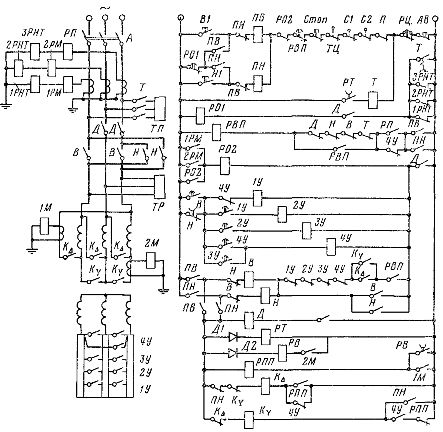
米。 2、地鐵自動扶梯電驅動方案。
所述切換由過電流繼電器 1M 和 2M 自動完成,它們通過 RPP 和 РВ 繼電器控制 kΔ 和 kY 接觸器。斷開延遲 RV 觸點確保 RPP 線圈電路在 2M 斷開和 1M 接通期間存在。
在滿載的發電機下降模式下,發動機的負載(由於安裝的機械損失)明顯低於爬升模式下的類似負載。因此,在下垂模式下,電機的定子繞組始終星形連接。使用加速器接觸器 1U-4U 上的擺動繼電器,電機隨時間啟動。停止是機械的。在這種情況下,行車製動器 TP 安裝在電機軸上,安全 TP 安裝在驅動齒輪軸上,以確保在齒輪和電機軸之間的機械連接斷開時梯子停止。
該電路實現了上一節中描述的典型安全聯鎖裝置:由於設備的機械部分出現故障——鏈條和扶手(限位開關 TC、P)的移除,違反步驟結構(限位開關 C1 和 C2) ),軸承溫度過高(熱繼電器 7),來自超速(離心速度繼電器 RC)。
此外,還提供電機保護:最大(繼電器 1RM、2RM)、過載(繼電器 RP)、電機斷電(零電流繼電器 1RNT、2RNT、3RNT)、電源接觸器閉合觸點的焊接(打開線圈電路 RVP 中的觸點 D、Y、B、T 和線圈電路 B 中的 1U-4U)。
斷電、軸承過熱和電機過載保護以時間繼電器 PO1 和 RVP 確定的時間延遲運行。除遠程控制速度繼電器外,所有保護都通過將電機與電源斷開並應用 TP 行車製動器來停止電機。只有在製動過程結束時,在 PT 繼電器的延遲結束後,安全制動器 TP 才會額外啟動。當啟動 RC 速度繼電器或按下緊急停止按鈕時,兩個制動器同時應用。