繪製時序圖和機制操作框圖的示例
在工藝線的控制方案中,輸出元件的狀態,即執行器(電磁繼電器、磁啟動器、固態繼電器等),不僅取決於輸入或接收元件(按鈕、傳感器等)的組合,還取決於它們隨時間變化的順序。
對設計的工藝過程的口頭描述可以用輸入輸出信號變化的時間表的形式來表示,稱為工藝過程的時間圖。

將根據穀物預清理線圖製作時序圖的示例。
電路工作說明
使用 SA1 開關選擇操作模式:自動 — 主要操作模式,手動 — 調試模式。
調試模式包括通過鎖定按鈕 SB4-SB6 向線性機構的磁啟動器線圈供電,繞過所有控制邏輯。在這種模式下,操作員自己決定生產線的長度或一些單獨的機制,料斗的填充控制僅在視覺上進行。
通常,這種操作模式用於緊急操作模式,當控制邏輯被破壞並且需要在不丟失產品的情況下完成工藝流程時,或者在調試期間,當某些機制修復後就行了,有必要只啟動它,而不是所有的線性機制。
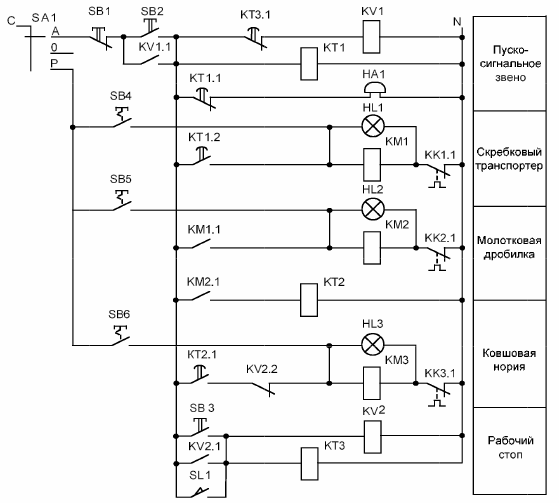
米。 1.糧食預清線繼電接點控制電路
在操作模式切換之後,控制電路中包含一個啟動信號塊,它允許在延時的情況下同時關閉鐘罩和打開刮板輸送機。在組成繼電器觸點電路時,通過磁力啟動器的閉合觸點來執行打開或關閉機構的順序。
因此,在我們的例子中,如果磁力啟動器 KM1(刮板輸送機)的線圈上有能量,分別通過觸點 KM1.1,磁力啟動器 KM2(錘子)的線圈上也會有能量。
同時,啟動生產線的所有機構是不切實際的,因為在操作過程中,當生產線的兩個機構的電驅動器尚未達到其標稱操作模式時,可能會出現這種操作模式,並且產品是通過頭部機制傳遞給他們,導致生產線緊急停止。因此,在控制電路中,通過時間繼電器KT2實現的時間延遲向磁頭機構的磁啟動器KM3的線圈供電。
線性機構已接合,工作正在進行中。有時在操作過程中,有時料斗還沒有裝滿,必須關閉生產線。在這種情況下,控制方案中使用了“工作停止”塊,這使得以正確的順序(在產品沿線移動的方向)關閉生產線的所有機製成為可能。
因此,當按下SB3按鈕時,中間繼電器KV2導通,其斷開觸點KV2.2與線圈KM3斷開,行頭機構關閉。同時,時間繼電器 KT3 準備一份關於清洗產品機械裝置的生產線運行時間的報告。
一定時間後,時間繼電器 KT3.1 的觸點斷開與中間繼電器 KV1 的電路,中間繼電器 KV1 的觸點繞過啟動按鈕。這導致整個控制電路停止,結果是線性機構停止。觸發 SL1 料斗中的液位傳感器時控制電路運行的類似算法。
在所提出的控制方案中,線性電動機的過載保護是通過熱繼電器 KK1.1 ... KK3.1 的中斷觸點實現的,它們分別與磁力啟動器 KM1 .. 的線圈串聯安裝在電路中。 .KM3。
為了視覺控制控制電路中線性機構的操作,有指示燈 HL1 ... HL3。直線機構正常運行時,指示燈會亮起。緊急停機時,磁力啟動器電路中的電源消失,指示燈隨之熄滅。
根據電氣主要自動操作模式的方案,穀物預清潔線需要 3 個按鈕:SB1 «停止»、SB2 «開始» 和 SB3 «工作停止»,以及一個液位傳感器 SL1。因此我們有 4 個輸入元素。此外,按鈕接受自返回,即無需固定開機狀態。
構建時間表的示例
輸出項目4:轉鼓HA1、刮板輸送機KM1、錘式破碎機KM2和斗式提昇機KM3。
當按下 SB2 «Start» 按鈕時,第一個觸發鏈接(鈴 HA1)應激活 10 秒,以警告人員生產線即將啟動。
在 HA1 的鈴聲響起後,即。按下“啟動”按鈕 SB2 86 10 秒後,刮板輸送機 KM1 和衝擊式破碎機 KM2 啟動(見圖 2)。
機構的工作時間根據其生產率和產量確定,刮板輸送機、錘式破碎機和斗式提昇機的生產率分別為5t/h、3t/h和2t/h。穀物體積確定基於料斗的體積和每 1 立方米的一公斤穀物。
不同農作物的糧食形狀、密度和重量都不同,因此每種糧食一立方米的重量不可能相同。
讓我們假設沙坑的體積為 5 m。加載的穀物是蕎麥,重量為 560 - 660 kg。回收站的初始狀態是空的。那麼滿容器的糧食量:N=580×5=2900公斤。
斗式提昇機的生產率是所有機制中最低的;他還為這條線供應糧食。其工作時間為:Tm3 = 2000/2900 = 0.689 h = 41 min。
其餘機制的工作時間將超過 41 分鐘,並根據電路邏輯確定。
開啟刮板輸送機 KM1 和反擊式破碎機 KM2 後,必須給它們加速的時間。所有機制的加速時間都是 10 秒。斗式提昇機 KM3 最後啟動(啟動 KM1 和 KM2 後 10 秒),以免在錘式破碎機 KM2 和刮板輸送機 KM1 上造成產品堵塞。 41 分鐘後,所有需要填充料斗的產品將通過 KM3 斗式提昇機。
SL 液位傳感器的安裝方式使得在產品殘渣通過錘式破碎機 KM2 和刮板輸送機 KM1 之前就可以接收到料斗填充信號。
當 SL1 水平傳感器啟動時,KM3 頭部機構關閉(在按下 SB2 «開始» 按鈕後 41 分 20 秒後)。通過延時,KM1 和 KM2 同時關閉。這個時間延遲可以假設為 20 秒。
正常操作的時序圖如圖 2 所示。
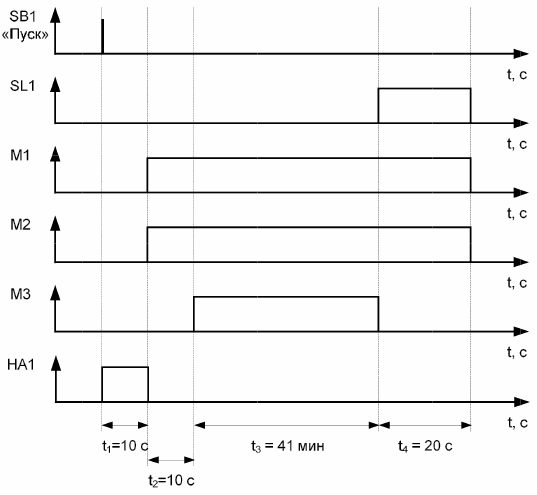
米。 2.正常運行時序圖
在《操作停止》模式下,操作員可以在觸發液位傳感器 SL1 之前停止過程,因此在這種情況下無法確定機構的操作時間。在 «General stop» 模式下,所有機制都會立即停用。
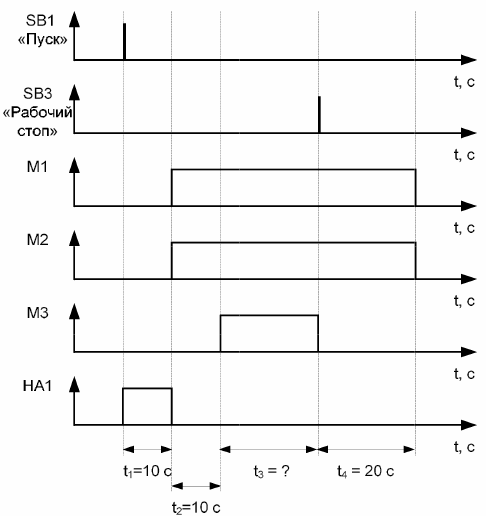
米。 3. «Operation stop» 運行模式的時序圖
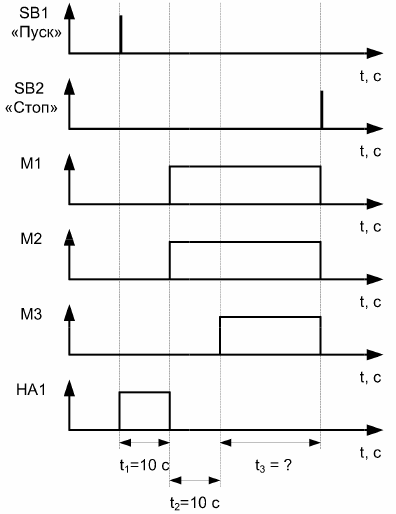
米。 4. «Total stop» 模式的時序圖
構建機制運行框圖的示例
工藝流程框圖必須清楚地顯示其工作算法。為此,使用了某些動作的特殊名稱。
圖 5 顯示了穀物預清洗線的示例框圖。所提供的方框圖顯示了工藝過程功能的所有可能選項。在按下“開始”按鈕SB2後穀物預清線運行期間,“事故”情況隨時可能發生。
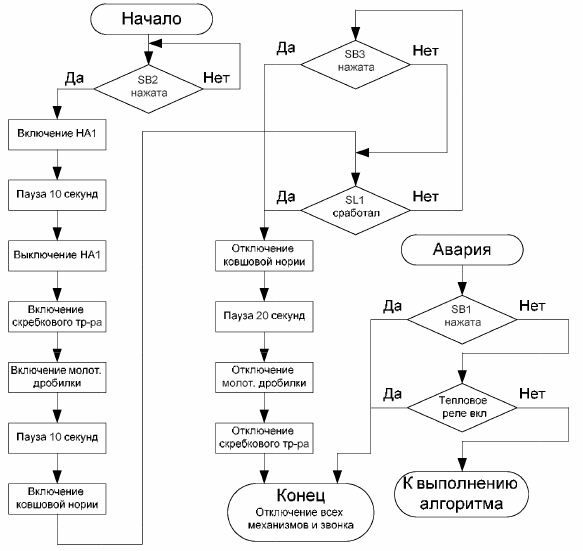
米。 5.糧食預清線方框圖