作為道路功能的電機控制電路
 路徑功能中的定向自動化或控制用於限制機構的移動或將其停止在路徑的任何中間點或終點。
路徑功能中的定向自動化或控制用於限制機構的移動或將其停止在路徑的任何中間點或終點。
受控佔空比的主要選項 鐵路自動化的要素,可以是:在循環結束時自動關閉電驅動器,自動限制驅動器每個元件的運動路徑而無需保持時間並在終點保持,在每個循環後停止機構的情況下反轉或長穿梭運動。
如果限位開關的故障可能導致事故,則額外安裝限位開關以關閉發動機。
在驅動電路中,未顯示帶有磁力啟動器的功率部分:電源電路的主觸點由線圈 KM 和不可逆啟動器驅動,如果啟動器是可逆的,則由線圈 KM1 和 KM2 驅動
圖中的圖表。a 和 b 用於在機構運動結束時通過限位開關關閉電機,彼此的區別僅在於其在控制電路中的位置以及由此產生的功能特性。在第一個電路中,被限位開關停止的電機不能按相同的方向重新啟動 開始按鈕,在第二種方案中,如果再次按下按鈕,機構可以繼續移動。
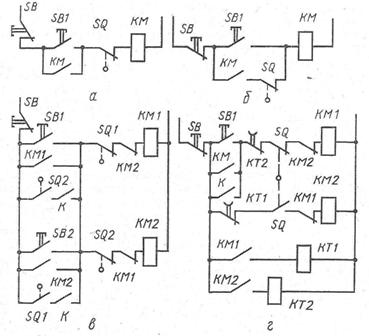
米。電機控制方案作為帶限位開關的行程的函數:a 和 b — 電機在機構運動結束時關閉,c — 限制機構的運動,d — 帶有末端位置時間延遲的循環運動
圖一控制電路c 規定機構沿由兩個限位開關 SQ1 和 SQ2 限制的路徑運動,工作可以離散和連續行程進行。在第一種情況下,當按下按鈕 SB1 時,機構開始向前移動,並移動直到按下限位開關 SQ1。要從此位置移除機構,請按 SB2 按鈕。
線圈KM1、KM2迴路中的分閘觸點KM2、KM1用於閉鎖。

對於在末端位置具有不同時間延遲的機構的循環操作,圖3中的示意圖。 d、發動機正轉啟動時,啟動按鈕SB1使時間繼電器KT1導通,其在接觸器KM2線圈迴路中的觸點斷開。運動一直持續到觸發開關 SQ 為止,這會打開接觸器線圈 KM1 的電路並閉合與其機械連接的 SQ 觸點。但反轉不會立即發生,因為斷開觸點 KT1 仍然斷開。
時間繼電器KT1與觸點KM1斷開,經過設定的延時倒計時,接通接觸器KM2的線圈,使電動機轉動。線圈 KM1 與觸點 KT2 的連接。電動機打開並移動機構,直到限位開關被啟動,之後循環以相同的順序重複。
如果根據使用條件,只有一個終端位置需要延時,則在控制電路中斷開一個時間繼電器及其分閘觸點。