機構運動的活塞控制
繼電器電路
 在圖。圖 1 顯示了由 SQ 控制器固定的恆定衝程活塞運動控制方案的各種變體。
在圖。圖 1 顯示了由 SQ 控制器固定的恆定衝程活塞運動控制方案的各種變體。
圖中的圖表。在圖 1 中,當循環由一個“向前”運動 B 和一個“向後”運動 H 組成到起始位置時,使用 a-c。方案一、a、b與KQ繼電器給定的自動命令一起使用。 KT 繼電器在開始反向之前提供暫停。在圖的圖表中。 1、循環啟動命令由控制器或萬能開關SM給定。
實現無限往復運動,如圖1、d.如果衝程數必須受給定值n的限制,則計數繼電器的一個斷開觸點或多個繼電器的一個單元,其對“後”接觸器KM2的閉合觸點提供的脈衝進行計數,是包含在接觸器電路 « 正向 » KM1 中。
圖 10 顯示了在四個位置實現可變行程長度的往復運動的示例。 2.命令裝置SQ的觸點SQ.1-SQ.4-用於在“前進”行程的1—4位置交替關閉機構,在初始位置觸點SQ.5-。該電路使用由自動繼電器 KQ1 和 KQ2 發出的脈衝命令,例如,在進給工件時,它是閉合的,它在每個行程結束時固定中間操作的結束。
SQ控制器的順序操縱SQ.1-SQ.3是通過繼電器的觸點進行的,用於計算“後退”機構KS1、KSZ和KS5的移動次數。繼電器 KS7 固定第四個移動“後退”,關閉繼電器 KS1-KC6 並禁止下一次“前進”切換,直到藍色到達這組空白(繼電器 KR)的技術操作結束。 KC7線圈電路中KR繼電器的斷開觸點使電路恢復原狀。
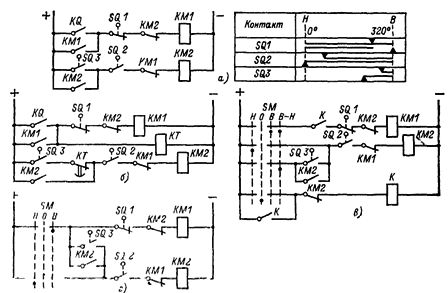
米。 1、往復運動繼電器控制電路
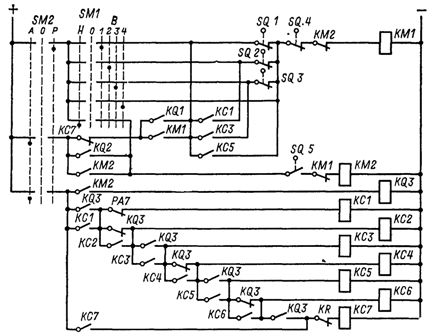
圖 2. 可變行程長度往復式繼電器的控制方案
邏輯電路
在 «Logic T» 系列元件上製作的活塞運動控制電路如圖 1 所示。 3. T-201型元件D1-D3用於協調輸入繼電器信號與邏輯元件。
當繼電器 KQ 以脈衝方式接通時,元件 D4.1、D4.2 的存儲器修復了“向前”移動命令的存在。通過放大器D5,前置接觸器KM1導通。在“前進”機構運動結束時,當控制器SQ1的觸點閉合時,相應元件D2的輸出端出現信號1,使存儲器D4和接觸器KM1斷開,接通元素 D6 上的內存。在這種情況下,給出並記住移動“後退”的命令。當控制器 SQ 2 的觸點在初始位置閉合,當信號 1 出現在相應元件 D3 的輸出端,禁用存儲器 D6 時,該命令被移除並且向後運動停止。
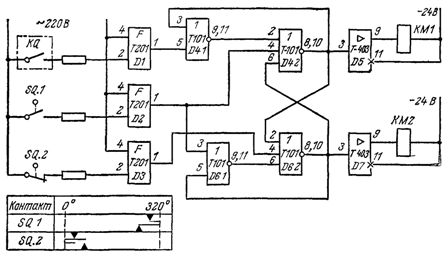
米。 3. 控制 «Logic T» 系列元素往復運動的方案
內存D4和D6被屏蔽,所以只能打開其中一個。當存儲器 D4 打開時,來自元件 D4.2 輸出的信號 1 被饋送到元件 D6.2 的輸入 2,禁用存儲器 D6,反之亦然。當存儲器 D6 開啟時,來自元件 D6 2 輸出的信號 1 被饋送到元件 D4.2 的輸入 6,從而禁用存儲器 D4。