晶閘管穩壓器
 晶閘管電壓調節器是設計用於控制電動機速度和扭矩的裝置。速度和扭矩的調節是通過改變提供給電機定子的電壓來實現的,並且是通過改變晶閘管的打開角度來實現的。這種電機控制方法稱為相位控制。這種方法是一種參數(振幅)控制。
晶閘管電壓調節器是設計用於控制電動機速度和扭矩的裝置。速度和扭矩的調節是通過改變提供給電機定子的電壓來實現的,並且是通過改變晶閘管的打開角度來實現的。這種電機控制方法稱為相位控制。這種方法是一種參數(振幅)控制。
晶閘管電壓調節器可以用封閉式和開放式控制系統來實現。開環調節器不能提供令人滿意的速度控制性能。它們的主要目的是調整扭矩以獲得驅動器在動態過程中所需的操作模式。
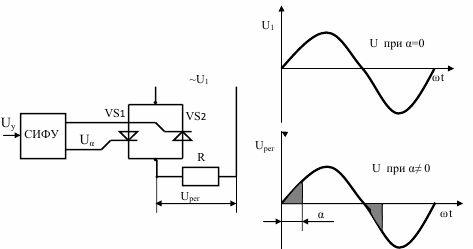
晶閘管穩壓器的簡化方案
單相晶閘管穩壓器的功率部分包括兩個受控晶閘管,可確保電流在正弦輸入電壓下沿兩個方向在負載上流動。
閉環晶閘管控制器通常使用負速度反饋,這使得在低轉速區域具有足夠剛性的驅動器機械特性成為可能。
最有效地使用晶閘管調節器進行速度和轉矩控制 異步轉子電機.
晶閘管穩壓器的供電電路
在圖。圖 1 的 a-e 顯示了在一相中包含調節器的整流器元件的可能方案。其中最常見的是圖 1 中的圖表。 1,一個。它可用於定子繞組的任何連接方案。在連續電流模式下,該電路中允許通過負載的電流(均方根值)為:

其中 Azt 是通過晶閘管的電流的允許平均值。
最大正向和反向晶閘管電壓

kzap——考慮到電路中可能的操作過電壓而選擇的安全係數; ——網絡線電壓的有效值。
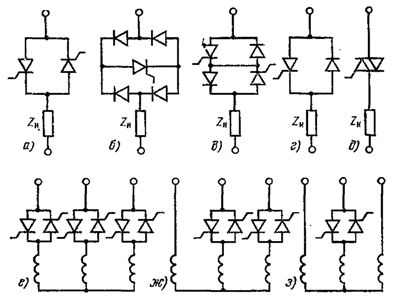
米。 1、晶閘管穩壓器電源電路方案。
在圖的圖表中。在圖1b中,非受控二極管橋的對角線上只有一個晶閘管。該電路的負載電流與晶閘管電流之比為:

選擇不受控二極管的電流是晶閘管的一半。晶閘管的最大正向電壓
晶閘管的反向電壓接近於零。
圖中的示意圖。圖 1b 與圖 1b 的方案有一些不同。 1、但是對於管理體系的建設。在圖的圖表中。 1,每個晶閘管的控制脈衝必須遵循電源的頻率。在圖的圖表中。在圖 1b 中,控制脈衝的頻率是原來的兩倍。
圖中的示意圖。 1、c,由兩個晶閘管和兩個二極管組成,如果可能,晶閘管的控制、負載、電流和最大正向電壓類似於圖1中的示意圖。 1,一個。
由於二極管的分流作用,該電路中的反向電壓接近於零。
圖中的示意圖。 1d 的晶閘管電流和最大正向和反向電壓與圖 1d 的電路相似。 1,一個。圖中的示意圖。 1、d不同於控制系統考慮的要求,提供必要的晶閘管控制角變化範圍,如果角度從零相電壓開始計算,則對於圖1中的電路。 1、a-c的關係
其中φ-負載的相位角。
對於圖一電路1,d,類似的比率採用以下形式:
增加角度變化範圍的需要復雜化 晶閘管控制系統……如圖所示。如圖 1 所示,當定子繞組在沒有中性導體的情況下以星形連接,以及在整流器包含在線路導體中的三角形連接時,可以應用 d。該方案的範圍僅限於具有反向接觸的不可逆和可逆電驅動。
圖中的示意圖。 4-1,e在其性質上與圖4中的方案類似。 1,一個。這裡的三端雙向可控矽電流等於負載電流,控制脈衝的頻率等於電源電壓頻率的兩倍。三端雙向可控矽電路的缺點比傳統晶閘管小得多,允許值 du / dt 和 di / dt。
對於晶閘管穩壓器,最合理的方案如圖。 1、但用兩個反並聯的晶閘管。
調節器的電源電路在所有三相(對稱三相電路)、電機的兩相和一相中均採用反並聯晶閘管實現,如圖 1 所示。 1, f, g 和 h 分別。
在起重機電氣驅動器中使用的穩壓器中,應用最廣泛的是圖 1 所示的對稱開關電路。 1, e,其特點是高次諧波電流的損耗最低。具有四個和兩個晶閘管的電路中較大的損耗是由電機相位中的電壓不平衡決定的。
PCT系列晶閘管穩壓器基本技術數據
PCT 系列晶閘管調節器是用於改變(根據給定法則)提供給帶繞線轉子的感應電動機定子的電壓的裝置。 PCT 系列晶閘管控制器是根據對稱三相開關電路製造的(圖 1,e)。在起重機電驅動中使用指定係列的調節器可以在 10:1 範圍內調節旋轉頻率,並在啟動和停止期間以動態模式調節發動機扭矩。
PCT 系列晶閘管穩壓器設計用於 100、160 和 320 A 的連續電流(最大電流分別為 200、320 和 640 A)和 220 和 380 V AC 的電壓。該穩壓器由組裝在一個公共框架上的三個電源單元(根據反並聯晶閘管的相數)、一個電流傳感器單元和一個自動化單元組成。電源使用帶擠壓鋁型材冷卻器的平板晶閘管。風冷——自然。所有版本的調節器的自動化塊都是相同的。
晶閘管調節器的製造防護等級為 IP00,旨在安裝在標準 TTZ 型磁性控制器框架上,其設計類似於 TA 和 TCA 系列控制器。 PCT系列調壓器的外形尺寸和重量如表所示。 1.
表1 PCT系列穩壓器外形尺寸及重量

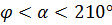
TTZ 磁力控制器配備了用於使電機反轉的方向接觸器、轉子電路的接觸器和電力驅動器的其他繼電器接觸元件,它們將控制器與晶閘管調節器進行通信。調節器控制系統的構造結構由圖1所示的電驅動功能圖可見。 2.
三相對稱晶閘管塊T由SFU相控系統控制。使用調節器中的控制器KK,改變BZS的速度設置,通過塊BZS,在時間的函數中,控制轉子電路中的加速器KU2。參考信號與TG測速發電機的差值經放大器U1和UZ放大,在放大器UZ的輸出端接一個邏輯繼電器器件,有兩種穩定狀態:一種對應於正向接觸器的接通KB,第二個 - 接通正向接觸器反向 KN。
在邏輯器件狀態發生變化的同時,開關設備的控制電路中的信號發生反轉。來自匹配放大器 U2 的信號與來自限流塊 TO 的電機定子電流延遲反饋信號相加並饋送到 SFU 的輸入端。
邏輯塊 BL 還受到來自電流傳感器 DT 和電流存在模塊 NT 的信號的影響,這會在通電時禁止方向接觸器的切換。 BL單元還對穩速系統進行非線性校正,以保證驅動的穩定性。調節器可用於起重和行走機構的電力驅動。
PCT 系列穩壓器帶有限流系統。用於保護晶閘管免受過載和限制動態模式下電機扭矩的電流限制水平從穩壓器額定電流的 0.65 到 1.5 平穩變化,用於防止過電流的電流限制水平從 0 ,9 到。 2.0 調節器的額定電流。廣泛的保護設置允許相同標準尺寸的調節器與功率相差約 2 倍的電機一起運行。
米。 2. PCT型晶閘管調節器電驅動功能圖:KK——指令控制器; TG——測速發電機; KN、KB——方向接觸器; BZS——速度設定塊; BL——邏輯塊; U1,U2。 US——放大器; SFU——相位控制系統; DT——電流傳感器; IT——當前存在單位; TO——限流單元; MT——保護單元; KU1、KU2——加速接觸器; KL——線性接觸器:R——斷路器。
米。 3.晶閘管穩壓器PCT
電流存在系統的靈敏度為相位中的 5-10 A rms 電流。穩壓器還提供保護:零、開關過電壓、至少一個相位(阻止 IT 和 MT)中的電流損失、無線電接收乾擾。PNB 5M 型高速熔斷器提供短路電流保護。