電磁繼電器的基本參數和特性
 應用繼電器控制規律的電器稱為繼電器... 在繼電器中,當控制(輸入)參數平穩地變化到某一設定值時,被控(輸出)參數發生突變。此外,這些參數中至少有一個必須是電氣參數。
應用繼電器控制規律的電器稱為繼電器... 在繼電器中,當控制(輸入)參數平穩地變化到某一設定值時,被控(輸出)參數發生突變。此外,這些參數中至少有一個必須是電氣參數。
功能器官的作用 電磁繼電器 可以根據圖1中的圖進行追溯。 1、接收體A將提供給磁路1的線圈2的輸入值(電壓)Uin轉換為中間值,即在錨 3 的機械力中。錨的機械力 FЯ 作用在執行機構 B 的接觸系統上。中間值 — 錨 FЯ 的力與輸入值 Uin 成正比,與 a 進行比較由中間體 B 的彈簧 9 產生的力 Fpr 的給定值。當 Uin < Uav, Fya
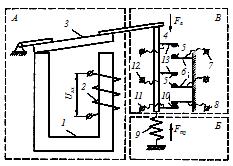 米。 1 電磁繼電器方案
米。 1 電磁繼電器方案
電磁繼電器在動作過程中,時間刻度上分為四個階段:動作階段(時間)tav、工作階段twork、關斷階段(時間)toff、靜止階段(時間)tp(圖2).
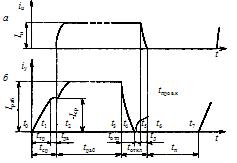
米。 2. 產出量(a)和產出量(b)對時間的依賴性
電磁繼電器的動作週期
 響應期包括從輸入信號開始作用於監測體開始到信號出現在被控電路中的時間間隔。橫坐標軸tav=t2-t0的段對應圖1中的這個週期。 2,乙。在 t0 時刻,繼電器線圈中的電流增加到一個值,此時作用在電樞上的電磁力 Fe 開始與中間體的彈簧力 Fm(機械力)相反。輸入值稱為接受值。
響應期包括從輸入信號開始作用於監測體開始到信號出現在被控電路中的時間間隔。橫坐標軸tav=t2-t0的段對應圖1中的這個週期。 2,乙。在 t0 時刻,繼電器線圈中的電流增加到一個值,此時作用在電樞上的電磁力 Fe 開始與中間體的彈簧力 Fm(機械力)相反。輸入值稱為接受值。
初始週期對應於段 ttr = t1 — t0。在時間t1,繼電器電磁鐵的銜鐵開始運動。在 tdv = t2 - t1 期間,錨移動,克服中間體 B 的阻力(見圖 1)並激活執行體 C。
在電樞行程結束時,驅動觸點閉合,負載電流(圖 2,a)開始從零增加到平衡值。開始控制輸出電路的輸入值稱為接受值 (Iav)。 Isr對應的功率Psr稱為驅動功率。
響應時間 t cf = ttr + tdv。
電磁繼電器的響應時間從 1-2 到 20 毫秒不等。電磁時間繼電器提供長達 10 秒的延遲。
為了估計繼電器的響應時間,可以使用表達式
t cf = t1kz-bm –a,
其中 t1 是給定安全係數 ks 和係數 m = 1 的響應時間; a、b——根據繼電器的類型和 kz 和 m 的值確定的係數。
對於 kz = 1.5¦2 的高速繼電器,係數 a 的值接近 1。對於k z = 1.5¦3,a = 0.25¦0.95的普通繼電器,係數b的取值通常在1.4-1.6範圍內。
電磁繼電器動作時間
 工作週期包括時間間隔twork = t3 - t2,即從控制輸出電路時刻t2到輸入信號t3對敏感器官的影響終止時刻的時間。電流開始上升到 Iwork 的穩定值(圖 2,b)——這是輸入值的工作值,可確保繼電器可靠運行。
工作週期包括時間間隔twork = t3 - t2,即從控制輸出電路時刻t2到輸入信號t3對敏感器官的影響終止時刻的時間。電流開始上升到 Iwork 的穩定值(圖 2,b)——這是輸入值的工作值,可確保繼電器可靠運行。
Iwork / Icr = kz 之比稱為工作安全係數。
表徵繼電器敏感元件的過載能力,用輸入量的值,稱為動作量極限值Ioperating.max。
工作值的限制——這是敏感器官在短的正常時間內可以承受的值。但是,由於電氣或機械強度或發熱的條件,當繼電器在正常模式下運行時,該值的值是不可接受的。
控制功率概念 Ru 用於表徵繼電器驅動器的負載承載能力。控制功率是驅動器能夠長時間傳遞的被控電路中的功率。
電磁繼電器脫扣時間
 關閉週期包含時間間隔 toff = t6 — t3,即從對感知器官的衝擊停止的時刻t3到受控電路中的電流減小到零的時刻的時間(圖16,a)。
關閉週期包含時間間隔 toff = t6 — t3,即從對感知器官的衝擊停止的時刻t3到受控電路中的電流減小到零的時刻的時間(圖16,a)。
關閉期間包括繼電器關閉的釋放期間 totp = t4 - t3。繼電器線圈中的電流 iy 降至零(圖 2,b)。在此期間,相反的彈簧力(機械力)超過電磁力,即。 Fm>Fe,電樞釋放。
選擇接觸故障後(時間間隔 tc = t5 — t4),繼電器觸點打開並在它們之間點燃電弧,電弧在時間 td = t6 — t5 後熄滅。在 td 期間,受控電路中的電流從 In 減小到零(圖 2,a)。
關斷時間 t t = tp + tc + td。
脫扣週期由恢復係數表徵,即下降電流 Iotp 與啟動電流 Iav 之比:kv = Iotp / Icr。
通常,對於將輸入參數控制在窄範圍內的電力系統保護繼電器和控制繼電器,kv 應更接近於 1。
電磁繼電器的休止期
休息期是時間間隔 tp = t7 — t6。
延遲時間由稱為不工作值的參數表徵,該參數是確保繼電器不工作或保持的輸入量的最大值。關機時間短於操作啟動時間和釋放時間。
控制功率與驅動功率的比值稱為增益,ku = Py / Pcr。
每單位時間的啟動次數由一個與循環時間成反比的值確定:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
拉科塔 O.B.