通過改變定子極對數來調節感應電動機的角速度
 隨著磁極對數的增加,磁場的角速度減小,因此感應電動機的轉子速度也減小。特別版本 雙速異步電動機,其定子繞組由獨立的部分組成。它們可以以兩種不同的方式再次連接:星形和雙星形(圖 1,a,b)或三角形和雙星形(圖 1,b,d)。
隨著磁極對數的增加,磁場的角速度減小,因此感應電動機的轉子速度也減小。特別版本 雙速異步電動機,其定子繞組由獨立的部分組成。它們可以以兩種不同的方式再次連接:星形和雙星形(圖 1,a,b)或三角形和雙星形(圖 1,b,d)。
在雙星中,場速總是雙星或三角形的兩倍。然而,這些開關並不相等。事實上,連續運行期間的最大允許轉矩取決於繞組加熱條件下的最大允許相電流,並取決於與相電壓的平方成比例的定子磁通。長期允許功率也取決於相同的值。
如果將電機的繞組從星形改為雙星形,相電壓不變,而從三角形改為雙星形時,相電壓下降√3倍。但是對於雙星形,每相的電流可以是星形或三角形的兩倍,因為每相由兩個並聯支路組成。然後我們發現,當從恆星到雙星時,速度和功率翻倍,因此臨界力矩保持不變(M = P /ω= const)。
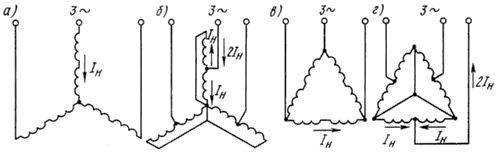
米。 1. 星形 (a) 和雙星形 (b)、三角形 (c) 和雙星形 (d) 異步電動機定子繞組的連接方案
如果從三角形變為雙星形,則相電壓降低√3 倍。那麼,即使是兩相電流,功率也只會增加2 /√3 = l,18倍,可以認為沒有變化。在這種情況下,隨著角速度增加兩倍,功率幾乎發生變化,而力矩大約減少兩倍。因此,推薦使用星形連接繞組驅動起重設備的電機,以及驅動金屬切割機的定子繞組連接三角形的電機。

米。 2.多速電機通行證數據
有兩個定子繞組相互隔離的異步電動機,其中一個沒有切換,第二個有切換極。之後,獲得三速發動機。如果兩個繞組都變極,則電機為四級。在某些情況下,使用兩個極對數不同的絕緣繞組。 pp 無需切換。例如,在電梯電機中,p1 = 3 和 p2 = 12,對應於 1000 和 250 rpm 的同步旋轉速度。
在圖。圖 3a 顯示了雙速星型到雙星型電機的機械特性, 3、b——由三角變雙星時。
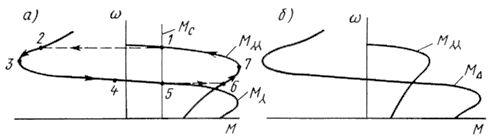
米。 3...從星形切換到雙星形(a)和從三角形切換到雙星形(b)時異步電動機的機械特性
在從較高速度快速切換到較低速度的情況下,發動機會運行一段時間。 懸浮模式……事實上,如果磁場的速度降低,那麼在第一時刻轉子繼續以相同的速度旋轉。
發動機立即從一種特性切換到另一種特性,即從點 1 到點 2(圖 3,a)。再生製動緊隨其後(第 2、3、4 點),在第 5 點開始以穩定狀態運行。如果你從較低的速度切換到較高的速度,電機立即從點 5 移動到點 b,然後加速度跟隨(點 6 和 7)並且在點 1 再次出現平衡狀態。