電位傳感器
電位器傳感器是一個可變電阻器,施加電源電壓,它的輸入值是集流觸點的線性或角位移,輸出值是該觸點所承受的電壓,其大小隨著其位置的變化而變化變化。
電位傳感器設計用於將線性或角位移轉換為電信號,以及在連續類型的自動和自動設備中再現最簡單的功能依賴性。
 電位傳感器接線圖
電位傳感器接線圖
按阻值,電位傳感器分為
-
具有恆定電阻的薄片;
-
連續纏繞的線圈;
-
帶有電阻層。

由於某些設計缺陷,層狀電位傳感器用於進行相對粗略的測量。
在此類傳感器中,以特殊方式名義上選擇的恆定電阻器被焊接到薄片上。
薄片是一種具有交替導電和非導電元件的結構,集電極觸點在其上滑動。當集電器從一個導電元件移動到另一個導電元件時,連接到它的電阻器的總電阻會發生變化,變化量對應於一個電阻的標稱值。電阻的變化可以在很寬的範圍內發生。測量誤差由接觸墊的尺寸決定。
層狀電位器傳感器
線式電位器傳感器專為更準確的測量而設計。通常,他們的設計是由 getinax、textolite 或陶瓷製成的框架,細線纏繞在一層上,一圈一圈地轉動,集電器在其清潔的表面上滑動。
線徑決定 精度等級 電位器傳感器(高為0.03-0.1mm,低為0.1-0.4mm)。線材:錳銅、鐵鉻合金、貴金屬合金。滑環由較軟的材料製成,以防止電線磨損。
電位器傳感器的優點:
-
設計簡單;
-
體積小,重量輕;
-
靜態特性的高度線性;
-
特性的穩定性;
-
交流電和直流電操作的可能性。
電位器傳感器的缺點:
-
存在滑動觸點,這可能會由於觸點跡線氧化、轉彎摩擦或滑塊彎曲而造成損壞;
-
由於負載導致的操作錯誤;
-
相對較小的轉換係數;
-
高靈敏度閾值;
-
噪音的存在;
-
在脈衝放電的影響下對電腐蝕的敏感性。

電位傳感器的靜態特性
不可逆電位傳感器的靜態特性
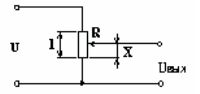
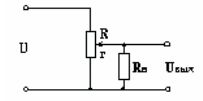
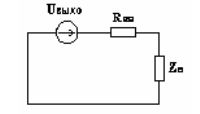
讓我們以帶有連續線圈的電位計傳感器為例。在電位器端子上施加交流或直流電壓U,輸入值為位移X,輸出值為電壓Uout。對於空閒模式,傳感器的靜態特性是線性的,因為關係成立:Uout = (U / R) r,
其中 R 是線圈電阻; r 是線圈一部分的電阻。
鑑於 r / R = x / l,其中 l 是線圈的總長度,我們得到 Uout = (U / l) x = Kx [V / m],
其中 K 是傳感器的轉換(傳輸)係數。
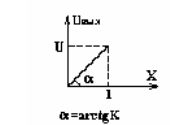
顯然,這樣的傳感器不會響應輸入信號符號的變化(傳感器是不可逆的)。有些方案對簽名的變化很敏感。這種傳感器的靜態特性具有如圖所示的形式。
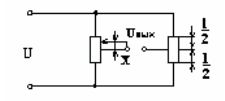
電位器傳感器的可逆電路
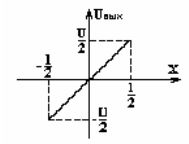
可逆電位傳感器的靜態特性
由於存在各種類型的錯誤,由此產生的理想特性可能與真實特性有很大差異:
1.死區。
輸出電壓逐圈離散地變化,即。當輸入值較小且 Uout 不變時,會出現此區域。
電壓跳變的大小由以下公式確定:DU = U / W,其中 W 是匝數。
靈敏度閾值由線圈導線的直徑決定:Dx = l / W。
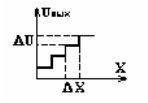
死區電位傳感器
2. 由於線徑、電阻和繞線間距的變化,靜態特性不規則。
3、電機迴轉軸與導套之間產生的齒隙誤差(採用壓縮彈簧減小)。
4.摩擦造成的誤差。
在驅動電位器傳感器電刷的元件功率較低時,由於摩擦可能會出現停滯區。
刷子壓力必須仔細調整。
5、負載影響造成的誤差。
根據負載的性質,在靜態和動態模式下都會發生錯誤。對於有源負載,靜態特性會發生變化。輸出電壓值將根據以下表達式確定:Uout = (UrRn) / (RRn + Rr-r2)
這些。 Uout = f (r) 取決於 Rn。 Rn >> R 可以證明 Uout = (U / R) r;
當 Rn 近似等於 R 時,相關性是非線性的,傳感器的最大誤差將在滑塊偏離 (2/3))l 時出現。通常選擇 Rн / R = 10 … 100。x = (2/3) l 處的誤差大小可以通過以下表達式確定:E = 4/27η,其中 η= Rн / R — 負載係數。
負載下的電位傳感器
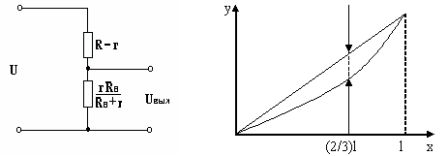 a——帶負載的電位傳感器等效電路,b——負載對電位傳感器靜態特性的影響。
a——帶負載的電位傳感器等效電路,b——負載對電位傳感器靜態特性的影響。
電位傳感器的動態特性
傳輸功能
推導傳遞函數,以負載電流為輸出值比較方便;它可以使用等效生成器定理來確定。 B = Uout0 / (Rvn + Zn)
考慮兩種情況:
1. 負載是純有源 Zn = Rn 因為 Uout0 = K1x In = K1x / (Rin + Rn)
其中 K1 是傳感器的怠速。
應用拉普拉斯變換,我們得到傳遞函數 W (p) = In (p) / X (p) = K1 / (Rin + Rn) = K
這樣,我們就得到了一個無慣性的連接,也就是傳感器具有與這個連接對應的所有頻率和時間特性。
等效電路
2.帶有有源元件的感性負載。
U = RvnIn + L (dIn / dt) + RnIn
應用拉普拉斯變換,我們得到 Uoutx (p) = In (p) [(Rvn + pL) + Rn]
通過變換,可以得到形式為 W (p) = K / (Tp + 1) 的傳遞函數——一階非週期性連接,
其中 K = K1 / (Rvn + Rn)
T = L / (Rvn + Rn);
電位器傳感器的內部噪聲
 如圖所示,當電刷從一圈移動到另一圈時,輸出電壓會突然變化。步進產生的誤差以鋸齒波電壓的形式疊加在傳遞函數的輸出電壓上,即是噪音。如果刷子振動,運動也會產生噪音(干擾)。振動噪聲的頻譜在音頻範圍內。
如圖所示,當電刷從一圈移動到另一圈時,輸出電壓會突然變化。步進產生的誤差以鋸齒波電壓的形式疊加在傳遞函數的輸出電壓上,即是噪音。如果刷子振動,運動也會產生噪音(干擾)。振動噪聲的頻譜在音頻範圍內。
為了消除振動,受電弓由幾根不同長度的金屬絲折疊在一起製成。那麼每根線材的自然頻率就會不同,這樣可以防止技術共振的出現。熱噪聲水平很低,在特別敏感的系統中會考慮到它們。
功能電位傳感器
需要注意的是,在自動化中經常使用函數傳遞函數來獲取非線性依賴關係,它們的構造方式有以下三種:
-
沿線圈改變導線的直徑;
-
線圈間距變化;
-
使用具有特定配置的框架;
-
通過操縱具有不同大小電阻的線性電位器的部分。
例如,要按照第三種方法獲得二次依賴,需要線性改變框架的寬度,如圖所示。
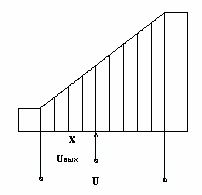
功能電位器傳感器
多圈電位器
傳統的電位器傳感器的工作範圍有限。其值由框架的幾何尺寸和線圈匝數決定。它們不能無限增加。因此,多圈電位器傳感器得到了應用,其中電阻元件以幾匝螺旋線扭曲,其軸必須旋轉幾次,以便電機從線圈的一端移動到另一端,即。這種傳感器的電氣範圍是 3600 的倍數。
多圈電位器的主要優點是它們的高分辨率和精度,這是由於電阻元件的長度大而整體尺寸小。
光電電位器
光電電位器 — 是帶有電阻層的傳統電位器的非接觸式模擬,其中的機械接觸被光導接觸取代,這當然會提高可靠性和使用壽命。來自光電電位計的信號由用作滑塊的光探頭控制。它由特殊的光學設備形成,並且可以由於外部機械作用而沿著光電導層移動。在光層曝光的位置,會發生過量(與暗相比)光電導,並形成電接觸。
光電電位計按用途分為線性型和功能型。
由於異形電阻層(雙曲線、指數、對數),功能光電電位計允許將光源的空間運動轉換為具有給定功能形式的電信號。