反轉和停止鼠籠式感應電動機
感應電動機是一種可逆電機。要改變轉子的旋轉方向,就必須改變磁場的旋轉方向(通過將電源線切換到電機兩相的端子)— 發動機啟動和製動電路
兩個旋轉方向的機械特性如圖 1 所示。 1.
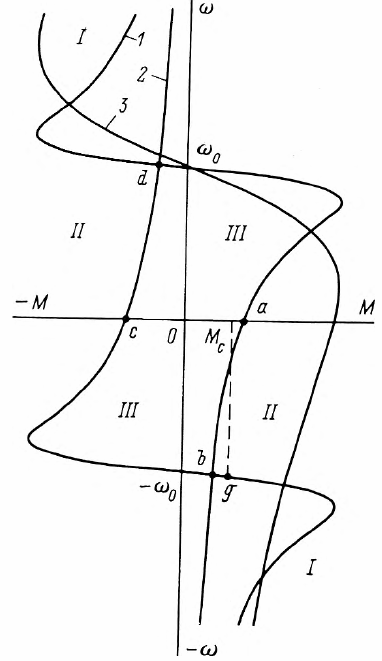
米。 1. 停止模式下可逆運行的感應電機的機械特性系列,能量供應到網絡 (I)、反向模式 (II) 和電機 (III) 1、2 — 自然; 3 - 人工。
鼠籠式感應電動機不僅可以用作電動機,還可以用作制動器。在停止模式下,每個電動機始終作為發電機工作。在這種情況下,具有鼠籠式轉子的感應電動機可以具有三種制動模式。
在再生製動模式下,機器以負滑差運行。在這種情況下,轉子的速度超過了磁場的旋轉速度。當然,要切換到這種模式,必須在軸的側面施加一個外部主動力矩。
反饋方式廣泛應用於起重設備中。在下降過程中,推進系統由於負載的勢能,可以獲得超過磁場旋轉速度的速度,下降將發生在機械特性上某一點g對應的平衡狀態,當下降負載產生的靜態力矩被發動機制動力矩平衡時。
在具有反作用靜態扭矩的傳統驅動器中,所討論的模式僅通過特殊的控制電路來實現,這使得降低磁場的旋轉速度成為可能。同一圖中顯示了反饋模式下感應電機的機械特性。 1.
如圖所示,發電機模式下的最大轉矩略高於電動機模式,臨界滑差的絕對值相同。
異步發電機本身的範圍很窄,即 風力發電廠... 由於風力不是恆定的,因此設備的旋轉速度會發生顯著變化,因此在這些條件下最好使用異步發電機。
應用最廣泛的是製動方式——對立。在兩種情況下(圖 1),可以向異步電機和直流電機過渡到這種模式:靜態轉矩顯著增加(ab 部分)或將定子繞組切換為不同的旋轉方向(節 c)。
在這兩種情況下,電機都以大於 1 的滑差運行,直到電流超過啟動電流。因此,對於鼠籠式電機,該模式只能用於快速停止驅動器。
當達到零速時,電機必須與電源斷開,否則它會向相反方向加速。
對置轉子電機制動時,必須在轉子電路中引入變阻電阻,以限制電流,增大製動力矩。
也可以 動態制動模式……然而,這會帶來一些困難。當電機與電源斷開時,機器的磁場也會消失。可以從連接到與交流網絡斷開的定子的直流電源激勵感應電機。電源應在定子繞組中提供接近標稱值的電流。由於此電流僅受線圈電阻的限制,因此直流電源電壓必須較低(通常為 10 - 12 V)。
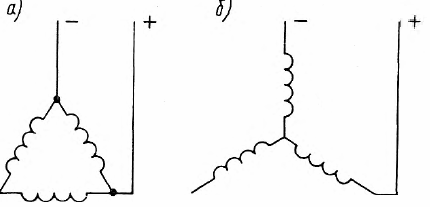
米。 2. 以三角形 (a) 和星形 (b) 連接時,將感應電機的定子連接到動態制動模式下的直流電源
自勵磁也用於動態制動。電容器連接到與電源斷開的定子。
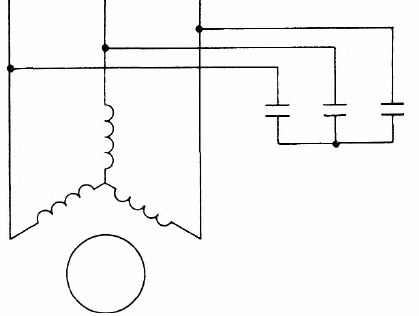
米。 3. 自激感應電機能耗制動示意圖
當轉子旋轉時,由於剩餘磁化和流過定子繞組以及電容器的電流,在定子電路中產生 EMF。當定子電路達到一定速度時,就會出現諧振情況:電感電阻的總和將等於電容電阻。機器自激的密集過程將開始,這將導致 EMF 增加。當電機E的電動勢與電容器兩端的電壓降相等時,自激模式結束。
隨著容量的增加,最大製動力矩向較低速度移動。所考慮的製動方式的缺點是製動作用只出現在一定的速度區內,低速時需要使用大電容進行製動。
從好的方面來說,不需要額外的電源。這種模式總是在電容器組連接到電機以提高供電網絡的功率因數的裝置中實施。
另請參閱此主題: 異步電動機的製動電路